
Forming images by using a swarm of mobile robots has emerged as a new platform for computer entertainment. Each robot has colored lighting, and the swarm represents various abstract patterns by using the lighting and the locomotion.
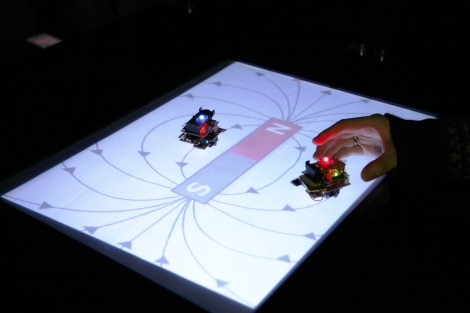
The aim of our research is to create a novel display field named “Phygital Field,” which integrates the physical world created by robot swarms and the digital world produced by a graphical display. To integrate them, we used a pixel-level visible light communication (PVLC) projector, which can superimpose metadata on pixels by human-imperceptible high speed flicker. The metadata contain coordinates, control instructions for robots, and more types of information. By combining the robot swarm and the graphical display, each type of image can be augmented. For example, each robot in a swarm can change its behavior in accordance with the metadata superimposed into images, and the graphical display could play multi-channel sound content by using speakers embedded on each robot.
So far, several types of systems for the symbiosis of robots and computer graphics have been proposed. Compared with these works, Phygital Field has three technical innovations.
受賞 Awards
MVE賞 田中 恭太郎, 福嶋 政期, 苗村 健: “可視光通信プロジェクタの多重化に関する基礎検討”, 信学技報 MVE2013-23, vol.113, no. 227, pp. 29 — 34 (2013.9).
国際学会 International Conference with Peer Review
Leijie Zhou,Shogo Fukushima,Takeshi Naemura: “Dynamically Reconfigurable Framework for Pixel-level Visible Light Communication Projector,” SPIE Photonics West 2014 (2014.2).
Takefumi Hiraki, Issei Takahashi, Shotaro Goto, Shogo Fukushima, and Takeshi Naemura: “Phygital Field: Integrated Field with Visible Images and Robot Swarm Controlled by Invisible Images,” ACM SIGGRAPH2015 Posters (2015.8).
国内学会 Domestic Conference
後藤 正太郎, 福嶋 政期, 苗村 健: “背面投影式空間分割可視光通信のスクリーン近傍への拡張”, VR大会, 11C-1 (2014.9).
平木 剛史, 高橋 一成, 福嶋 政期, 苗村 健: “可視光通信プロジェクタを用いた映像上における群ロボット制御の基礎検討”, 信学技報, MVE2015-3, vol. 115, no. 76, pp. 31 — 36