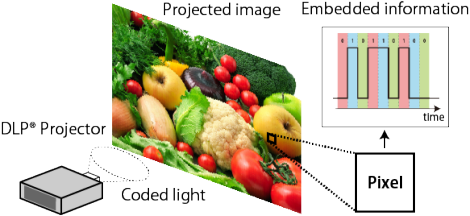
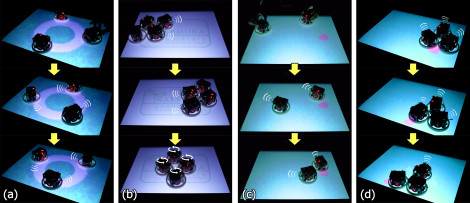
映像に連動させてロボットの群れを制御することでタンジブルメディアとするテーブルトップシステムにおいて,映像との時間・空間的整合を保ちながら制御信号をロボット群に伝送することは重要である.本稿では,可視光通信プロジェクタを用いて,投影映像にピクセル単位で不可視ビット情報を埋め込み,テーブルトップディスプレイ上のロボット群がその情報を受信,解析することで,群ロボット制御を実現するシステムを提案し,その実現のための技術的検討を行う.
国際学会 International Conference with Peer Review
Takefumi Hiraki, Issei Takahashi, Shotaro Goto, Shogo Fukushima, and Takeshi Naemura: “Phygital Field: Integrated Field with Visible Images and Robot Swarm Controlled by Invisible Images,” ACM SIGGRAPH2015 Posters, Article No. 85 (2015.8).
国内学会 Domestic Conference
平木 剛史, 高橋 一成, 福嶋 政期, 苗村 健, “可視光通信プロジェクタを用いた映像上における群ロボット制御の基礎検討”, 信学技報, MVE2015-3, vol. 115, no. 76, pp. 31 – 36, 2015.6. [ MVE賞 受賞 (2015.10.8)]