
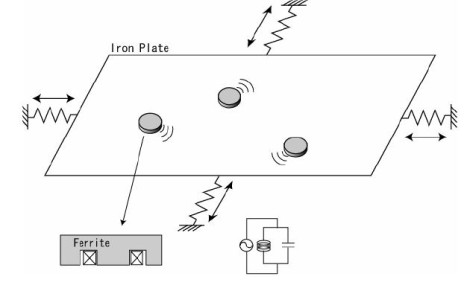
近年、コンピュータ中の情報を机上の実物体で現し、タンジブルメディアとする机上インターフェースが多く提案されている。しかし、従来の机上インターフェースの多くは、机上物体駆動のために机の下に大掛かりな装置を必要とし、また高速での駆動は難しかった。我々は磁性体の机自体を水平振動させ、物体側に取り付けた電磁石の電流を振動に同期させることで、物体を任意方向に駆動するシンプルな群ロボットシステムを提案する。
To overcome the limitation of visual information display, some works have proposed to use desktop “tangible” media. However, to drive the physical media on the desk, most works require a large scale device under the desk. Furthermore, high-speed motion was difficult. We propose a simple group robots system that utilizes horizontal vibration of the desk. The robot is a simple electromagnet, which is powered on and off according to the desk’s vibration phase.
受賞 Awards
対話発表賞. 福嶋 政期,橋本 悠希,梶本 裕之:水平振動を用いた机上群ロボットシステム,WISS 2007 (Workshop on Interactive Systems and Software), 2007/12/07 (in Japanese). 受賞報告
国際学会 International Conference with Peer Review
Shogo Fukushima, Yuki Hashimoto, Hiroyuki Kajimoto: Tabletop Interface using a Table’s Circular Vibration and Controllable Friction, In ‘Proceedings of CHI ’08 (Ex-tended Abstracts)’, Page 3801-3806, 2008. pdf
国内学会 Domestic Conference
福嶋政期, 橋本悠希, 梶本裕之 : 机上インタフェースのための高速移動可能な群ロボットシステム,日本バーチャルリアリティ学会 第12回大会論文集(2007年9月福岡),2007.
福嶋政期, 橋本悠希,梶本裕之:水平振動を用いた机上群ロボットシステム,WISS 2007,ハウステンボス,2007/12/05-07.
福嶋政期, 橋本悠希, 梶本裕之 : 水平振動を利用した群ボタンロボの提案,日本ロボット学会学術講演会第26回大会論文集(2008年9月神戸),2008 pdf
開発環境 Development Environment